
Arduino IDE vs costycnc.it/avr1
| Feature | Arduino IDE | costycnc.it/avr1 |
|---|---|---|
| Installation | Yes (IDE + drivers) | No, works directly in the browser | Configuration | Select board, port, chip | Nothing to configure: plug and go |
| First LED code | setup(), loop(), digitalWrite() |
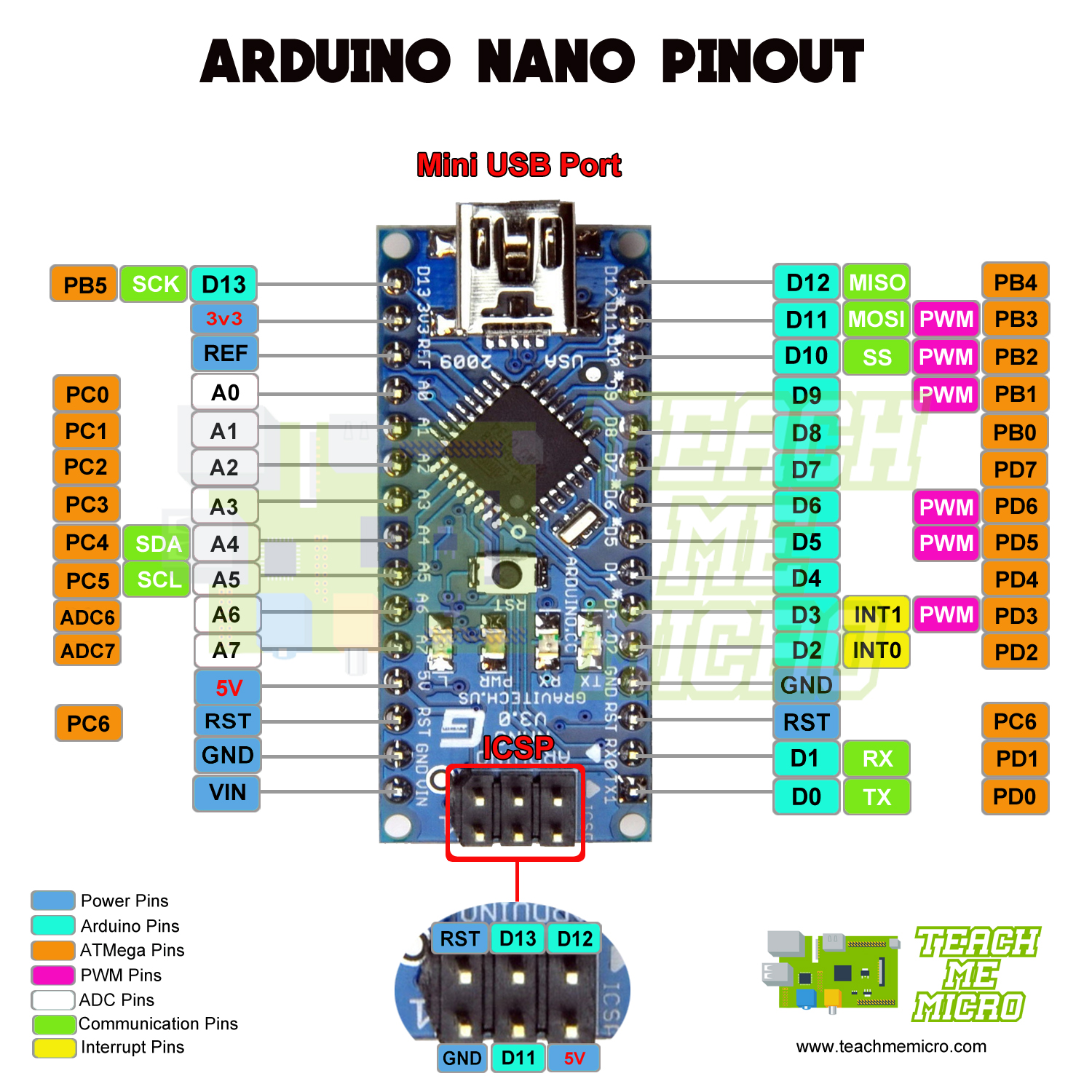
sbi 0x4,5 -> the LED turns on (PB5) |
| Libraries | Many, but often hide everything | None: you see the actual registers |
| Complex projects | Ideal, with many libraries | Limited to basic learning |
| Learning curve | Softer, but less transparent | More direct: you learn how it really works |
Welcome to costycnc.it/avr1 — a platform designed to show you that it's possible to program microcontrollers without libraries, without an IDE — no magic involved.
With just one click on the "Assemble" button, the site automatically turns your Assembly code into a HEX file, ready to upload to a microcontroller. No compilers needed. Everything happens right in your browser!
Use a simple USB cable to connect your board (e.g. Arduino UNO) to your computer. Click one of the buttons representing the microcontroller you're using (UNO, Nano, etc.). A window (Web Serial API) will open where you can select the USB port connected to your Arduino. Just click "Connect" ... and you're done!
Right after uploading, the onboard LED on pin 13 (PB5) will turn on. This is the result of your pure Assembly code — no libraries, no IDE, no external software. VIDEO





















{kind=link}
{kind=link}